ժҪ:����������п��Ƽ�㡢��λȷ���ص㡣���ſ�ѧ�����ķ�չ,���������õ��㷺��Ӧ�á����ڴ�ͳ������ϵͳ��ֲ�Բ���,�������������ϵͳ�������巢���������������,�������ķ���������������,ͨ��������̿��������趨���������ת�١���ת�Ƕȡ�ת�������Ϳ��Ʋ������������״̬���Լ��Ƶ�·,���������ɱ�,���ϵͳ������Ч�ʺ�����ԡ��ڴ˻����������˫���IJ������������Ƶ�Ӳ���ӿڵ�·����������ͼ�ͻ�����
��������������Զ�����ϵͳ�г��õ�ִ�в�������������������ź�Ϊ�������,���ܽ�����������ź�ת��Ϊ��Ծ�͵Ľ�λ�ƻ�ֱ��λ��,�����������ɿ�����һ�����е���/ģת���������ڲ�������ܹ�ֱ�ӽ��������ź�,��������/ģת��,����ʹ�������Ʋ�������Ե÷dz����㡣
��������������ŵ�:
- ͨ������Ҫ�������ܶ�λ�ú��ٶȽ��п���;
- ��������;
- �������豸����,�ܹ�ֱ�ӽ��������ź�;
- ���Կ�����ͣ��
���������Ʒ�ֹ��ܶ�,�������ǵĽṹ����ԭ�����Ի���Ϊ����ʽ(Ҳ�Ʒ�Ӧʽ������ʽ)��������ʽ���������ʽ��������ֵ����������Ҫ��ʽ��
�����������λ�ƴ������Ϳɾ�ȷ��λ,�����ھ�ȷ��λϵͳ��Ӧ�ù㷺��Ŀǰ���ֻ���������ⲿ�豸�����ػ�������������豸�ж�ʹ���˲�����������ŵ��Ӽ���������ķ�չ,��������ؽ��������Ŀ��Ʒ��㡢����ȷ���ص�,�ڹ�ҵ���Ƶ�����ȡ�ø�Ϊ�㷺��Ӧ�á�
1. ��������Ĺ���ԭ��
�Դ���ʽ�������Ϊ��,����һ�²�������Ĺ���ԭ��,ͼ1. 1�Ǵ���ʽ�����������ԭ����ʾ��ͼ��
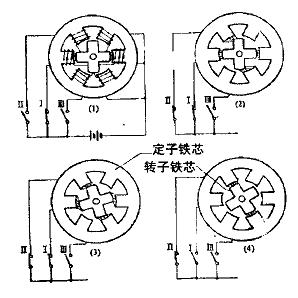
ͼ1. 1������ʽ��������Ĺ���ԭ��
���Ķ�������������,ת�����ĸ��������Ӵż���������������,ÿ���������������������Ȧ���ɡ�һ���������һ�ࡣ���,ͼ1. 1��ʾ�ĵ��Ϊ���ಽ�������ֱ����Դͨ������I����͢�,���������������ڶ����ϵ����顣
״̬(1) ,����I�պ�,A��ͨ�硣����A�������ܵ�����,����϶��������ͷ��ʾ�Ĵų���A���ϵ��������Ӵż�������ת�ӳݶ�,ת�Ӵ���ƽ��״̬�����ٱպϿ���R����B��,��״̬(2)��ʾ, B��Ķ��Ӵż���ͬ���ķ�ʽ�����ų����ڴ����ߵ�����������,������ʱ�뷽���ת�ء�����,ת������ʱ�뷽��ת��һ���̶��ĽǶ�,����״̬(3) ��ͼ��,ת���ĽǶ�Ϊ15�㡣������ڴ���I,ȥ��A��ļ���,ת�ӽ���ת15��,����״̬(4) �����,ת�ӵĽ�λ�ÿ��������ֿ��ط�ʽ���п��ơ���������ij��ʱ��ת��,��ת�Ӿ����Բ����˶��ķ�ʽ������ת;����һ��ʹʱ��ת�����ٶȿɵ�,��ƽ���ٶ�Ҳ�������ֿ��ط�ʽ���п��ơ�
ʵ����,������������Ŀ����Ǿ����,�����ź������ּ��ɵ�·����������ͨ��ǰ��Ľ��ܿ��Կ���,���������һ�ְѿ��ؼ����ı仯�任�ɾ�ȷ��ת��λ�������˶���ִ�л��� ��
2. �������������Ƶ����
2.1����������Ĵ�����ʽ
2.1.1��������Ĺ�����ʽ
�����ֹ�����ʽ��,A��B��C��������ͨ��,�����л�����,�ų���תһ��,ת����ǰת��һ���ݾ�ǡ��������ͨ�緽ʽ����������Ĺ�����ʽ����ʱ����Ǧ�b (��)Ϊ
��b = 360 /mz����( ��) (2-1)
ʽ��:m������������; z ����ת�ӳ���
2.1.2���������Ĺ�����ʽ
�����ֹ�����ʽ��,����A��ͨ��,ת�ӳ���A�ඨ�ӳݶ��롣�ڶ���,A�����ͨ��,ͬʱ��ͨB��,A��B���Խ����Ĵų��γ�һ���ϳɴų�,��ʱת�ӳݼȲ���A��Ҳ����B��,���Ƕ�A��B�������ߵĽǵȷ���,ʹת�ӳ������A�ඨ�ӳ�ת��1 /6�ݾ�,��1. 5�㡣������,A���ж�,��B�ౣ�ֽ�ͨ����ʱ,��B�ཨ���Ĵų��뵥����ʱB��ͨ������һ������������,������A��AB��B��BC��C��CA��Aʱ��(��ʱ��)ת��6��,�ų���תһ��,ת��ǰ��һ���ݾ�,ÿ���л���ʹת��ת��1. 5��,������ͨ�緽ʽ��Ϊ�������ع�����ʽ���䲽��Ǧ�b Ϊ:
��b = 360 /2mz = 180 /mz����( ��) (2-2)
2.1.3��˫���Ĺ�����ʽ
���ֹ�����ʽÿ�ζ��������ർͨ,�������鴦����ͬ��ѹ֮��,��AB��BC��CA��AB (��֮)��ʽͨ��,�ʳ�Ϊ˫���Ĺ�����ʽ�������ַ�ʽͨ��,ת�ӳ�������λ���൱�����Ŀ��Ʒ�ʽ��ȥ�������ĺ������λ�á����IJ���Ǽ��㹫ʽ�뵥����ʱ�Ĺ�ʽ��ͬ��
������������֪,Ҫʹ����ʽ����������й�������,������������Ƕ��Ӽ��ֶȽDz��ܱ��ݾ������,��Ӧ�������з���:
���ֶȽ�/�ݾ��= R + k��1/m
��һ������ó���z:
z = q (mR + k) (2-3)
ʽ��:m��������; q����ÿ��ļ���; k������ (m - 1)��������;
R����������,Ϊ0��1��2��3������
��ѡ���������Ͳ�ͬ�ļ���,����ʽ�Ϳ������ת�ӳ�����
��Ϊ����˫���IJ����������ʧ��,���ƾ��ȱȽϸ�,���Ա��Ķ�����˫���IJ���������п���,���������Դż�,����ʱ����ͬʱͨ��,ѭ������ת��ת����
2.2��Ӳ���ӿڵ�·
��ͳ�IJ����������ϵͳ����Ӳ�����п���,��һ�����巢��������Ƶ�ʱ仯�������ź�,�پ�һ������������ѷ�������źź������ź�ת������һ������ϵ�Ļ�������;��������·�Ŵ��Ϳ�����������������ˡ������ֿ�����,���������������Ӳ����·����,���ϵͳ�����仯��ʹ�ò�ͬ���͵IJ������,���������Ӳ����·,ϵͳ�Ŀ���ֲ�Բ��á�
��������ϵͳ�������巢���������������,�Ϳ��Ը���ϵͳ��Ҫͨ��������̵ķ��������趨���������ת�١���ת�Ƕȡ�ת�������Ϳ��Ʋ������������״̬�������ɼ��Ƶ�·,���������ɱ�,���ϵͳ������Ч�ʺ�����ԡ�ͼ2. 1Ϊ��Ƭ�����Ʋ�������ӿ�ԭ��ͼ��
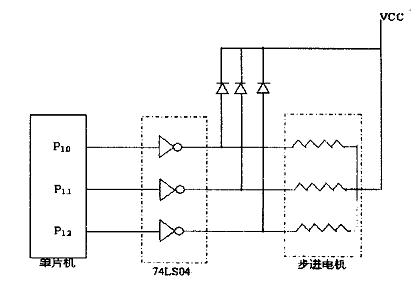
ͼ2.1����Ƭ�����Ʋ�������ӿڵ�·ԭ��ͼ
2.3��������γ�
ʵ�ֶԲ�������Ŀ���,��Ӧ�������һ�����ڵĿ������塣
������:�����һ���ߵ�ƽ,��ʱһ��ʱ���,������һ���͵�ƽ,Ȼ������ʱ���ı���ʱʱ��ij���,���ɸı����������,����������ɲ�������Ĺ���Ƶ��ȷ����
�������γɻ�������ij�������ͼ��ͼ2.2��ʾ��
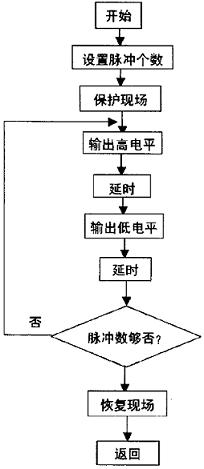
ͼ2.2���������γ��������еij�������
��������:
PULSE:MOV��R3 , # NUM
������PUSH A
������PUSH PSW
LOOP: SETB P1.0
������ACALL DELAY1
������CLR P1.0
������ACALL DELAY2
������DJNZ R3,LOOP
������POP PSW
������POP A
������RET
2. 4����ת�������
�����������ת������ڲ������ͨ��˳��ͨ�緽ʽ�����й�ϵ��
��������˫���Ĺ�����ʽ:
������ת:AB��BC��CA��AB
������ת:AB��CA��BC��AB
����˫���Ŀ���ģ�����2. 1��ʾ��

2. 5��ת�ٿ���
���Ʋ�������������ٶ�,ʵ�����ǿ���ϵͳ����ʱ�������Ƶ�ʻ��������,�������ٹ�����,ʹ��������Ƶ��������;�ڼ��ٹ�����,ʹ��������Ƶ�����١������źŵ�Ƶ�ʿ�����������ʱ��Ӳ���ж����ַ�����ȷ����
����������ʱ,һ���Ǹ��������ʱ�䳣�������һ���ӳ���,�ó������һ����ָ��,�����Ҫ����Щָ���ִ��ʱ��������ܵļ�����߾�ȷ�IJ���,�Ա�ȷ����ʱʱ���Ƿ����Ҫ��ÿ����ʱ�ӳ��������,����ִ������IJ���,Ҳ�������ָ�����һ���ź���Ϊ��ʱ���������������ʱ, CPUһֱ��ռ��,���CPU�����ʵ͡�
�ɱ�̵�Ӳ����ʱ��ֱ�Ӷ�ϵͳʱ�������ijһ�̶�Ƶ�ʵ�ʱ��������м���,����ֵ���ɱ�̾�������������Ԥ����������ʱ,�����ж��ź�,�õ��������ʱʱ���ʱ��������ڼ����ij�ʼֵ�ɱ�̾���,����ڲ��Ķ�Ӳ���������,ֻͨ������仯�������㲻ͬ�Ķ�ʱ�ͼ���Ҫ��,���ʹ�úܷ��㡣
2.6�����Ƴ������
���Ƴ������Ʒ�����:ͨ����־λFLAG���жϵ������ת����,Ȼ�������Ӧ�Ŀ�����������;�ж�Ҫ��������ź��Ƿ������ϡ�
����˫���Ŀ���ģ����ɵIJ���������Ƴ����������:
����˫���Ŀ��Ƴ�������ͼ��ͼ2. 3 ��ͼ2. 4��ʾ��
��ת����ģ��03H��06H��05H�������RMΪ��ʼ��ַ���ڴ浥Ԫ��,��ת����ģ��03H��05H��06H�������LMΪ��ʼ��ַ���ڴ浥Ԫ�С�
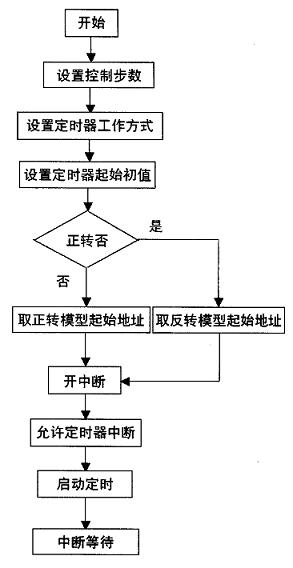
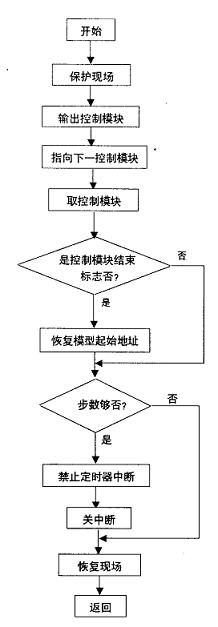
ͼ2.3������������ͼ ͼ2.4����ʱ���жϷ����������ͼ
����������:
CON: MOV��R3, # N
������MOV TMOD , # 10H
������MOV TL1 , # LOW
������MOV TH1 , # H IGH
������JNB FLAG ,LEFT
������MOV R0 , RM
������AJMP TIME - S
LEFT: MOV R0 , LM
TIME: SETB EA
������SETB ET1
������SETB TR1
WA IT: SJMP WA IT
�жϷ����������:
INTTO: PUSH����A
������PUSH PSW
������MOV A , @R0
������MOV P1 ,A
������INC R0
������MOV A , # 00H
������XRL A , @R0
������JNZ NEXT
������MOV A , R0
������CLR C
������SUBB A , # 03H
������MOV R0 , A
NEXT: DJNZ R3 , RETU
������CLR ET1
������CLR EA
RETU: POP PSW
������POP A
������RETI
3. �ܽ���չ��
��������ǻ���һ�廯��Ʒ�еĹؼ����֮һ,��һ���������õ����ֻ�ִ��Ԫ�������ż����Ӧ�ü��������Ӽ������Զ����Ƽ����ڹ��ø��������е��ռ�������,�����������Ҫ��Խ��Խ��������˵��,�����ϲ���������������10%���ϵ��ٶ����������ڶԲ������������ͬ��Ҳ���վ�����ʵ�ʹ�����,�ܶ�̼�����Ա�ͼ������˶�ϣ���Ƚ�ȫ����˽ⲽ�����������Ƽ�����
���ĶԲ�������Ŀ��Ʒ�����������ϸ������,����Ӳ���ӿڵ���ơ�������������ƺͻ����Ƴ���ı�д�����ַ�����Ч�����㡢�ɱ�����,��ʵ��Ӧ�������źܸߵ����ü�ֵ��
�����:
[ 1 ] ������. ����������Ƽ�������[M ]. �Ϻ�:ͬ�ô�ѧ������,1990.
[ 2 ] ֣ΰ. ��������ļ��������[ J ]. �عش�ѧѧ��, 1994 (4) .
[ 3 ] �����. �����������ϵͳ[ J ]. �Զ����������DZ�, 2003 (1) .
[ 4 ] ������. ��������������Ʒ�����������Է���[ J ]. ���������ѧѧ��(��Ȼ��ѧ��) , 2003 (8) .
[ 5 ] ����ƽ. dz̸�������������[ J ]. ��������, 2004 (5) .
[ 6 ] ������. ��������ٶȿ��Ƶ�������Ʒ���[ J ]. ��е�����,1994 (2) .
[ 7 ] ��ӭ��,������. ������������͵�Ƭ������[ J ]. �����������, 2003 (3) .
[ 8 ] ����. һ�ֿ��Ʋ������ת�ٵķ���[ J ]. �ص��, 2004 (1) .
[ 9 ] ������. Ӧ��8098��Ƭ��ʵ�ֶԲ�������Ŀ���[ J ]. �������Զ���, 2000 (4) .
[ 10 ] �ܺ�. ����ֱ�ӿ��ƵIJ�������ϵͳ[ J ]. ��ѹ����,1998 (8).
[ 11 ] ������,���,�¿�,���ݶ�. 8098��Ƭ���Բ�������������ٿ���[ J ]. ��е�����, 1995 (6).
[ 12 ] ������. һ�����Ͳ������������[ J ]. ����һ�廯,2004 (4).
[ 13 ] ������. ��PC�����Ʋ�����������ַ���[ J ]. ���Ӽ���, 1995 (12).
[ 14 ] ֣ѧ��. �ͼ�������Ƽ���[ J ]. �廪��ѧ������,1999 (3)
